来源:小编 更新:2025-08-10 12:55:03
用手机看
你有没有想过,ROS系统(机器人操作系统)里的那些工具,就像是机器人世界的魔法棒,让原本复杂的任务变得轻松有趣呢?今天,就让我带你一起探索ROS系统的那些神奇工具,看看它们是如何让机器人变得聪明起来的!
ROS系统,全称是Robot Operating System,它就像是一个大型的工具箱,里面装满了各种各样好用的工具。这些工具可以帮助开发者轻松地构建、测试和部署机器人应用。想象你想要让你的机器人学会跳舞,或者能够自动清理房间,ROS系统里的工具就能帮你实现这些梦想。
RViz是ROS系统中的一个可视化工具,它就像是一个全景地图,可以让你看到机器人周围的环境。想象你站在一个巨大的沙盘前,可以随意调整机器人的位置,观察它的运动轨迹。这就是RViz的魅力所在。
- 实时查看机器人传感器数据:比如激光雷达、摄像头等,让你了解机器人周围的环境。
- 模拟机器人运动:你可以调整机器人的速度、方向,观察它的运动轨迹。
- 可视化机器人模型:你可以看到机器人的各个部分,比如手臂、腿部等。
Gazebo是ROS系统中的一个物理模拟器,它可以帮助你模拟机器人在真实环境中的运动。想象你想要测试你的机器人是否能够在复杂的场景中导航,Gazebo就能帮你完成这个任务。
- 真实物理模拟:Gazebo使用物理引擎来模拟机器人的运动,确保模拟结果与真实环境相近。
- 丰富的场景库:Gazebo提供了大量的场景模型,你可以选择合适的场景来测试你的机器人。
- 插件支持:Gazebo支持各种插件,可以扩展其功能,比如添加新的传感器、控制器等。
Rviz是ROS系统中的一个可视化工具,它可以帮助你实时查看机器人的状态。想象你正在控制一个机器人进行任务,Rviz就像是一个监视器,让你随时了解机器人的位置、速度等信息。
- 实时显示机器人状态:包括位置、速度、方向等。
- 可视化机器人模型:你可以看到机器人的各个部分,比如手臂、腿部等。
MoveIt!是ROS系统中的一个运动规划库,它可以帮助你让机器人完成复杂的动作。想象你想要让你的机器人拿起一个杯子,或者完成一个复杂的舞蹈动作,MoveIt!就能帮你实现这些目标。
- 高效的运动规划:MoveIt!使用高效的算法来规划机器人的运动,确保动作流畅。
- 支持多种机器人模型:MoveIt!可以支持多种机器人模型,包括机械臂、腿部机器人等。
- 易于使用:MoveIt!提供了简单的API,方便开发者使用。
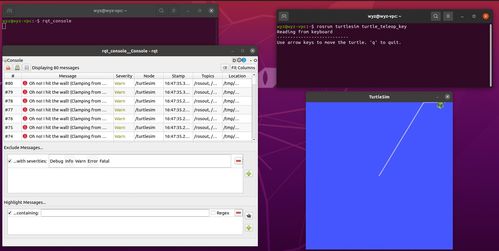
rqt_graph是ROS系统中的一个图形化工具,它可以帮助你了解ROS系统的内部结构。想象你想要了解ROS系统中各个组件之间的关系,rqt_graph就像是一张地图,让你一目了然。
- 可视化ROS系统结构:包括节点、话题、服务、参数等。
- 实时更新:rqt_graph会实时更新ROS系统的状态,让你随时了解最新的信息。
- 过滤功能:你可以通过过滤功能来查看特定的组件,比如只显示话题。
通过这些工具,ROS系统让机器人变得更加智能、灵活。无论是模拟、规划、控制,还是可视化,ROS系统都提供了丰富的工具来满足你的需求。所以,如果你对机器人感兴趣,不妨试试ROS系统,看看它能否帮助你实现那些有趣的机器人梦想!